CS 6670 Assignment 1
Marcus Lim (mkl65)
Feature descriptor
My feature descriptor first extracts a 16x16 oriented patch around the detected interest point. It then splits the 16x16 patch into 16 4x4 patches. It calculates the gradient directions and magnitudes in each of these patches, and throws out pixels with gradient magnitudes that are too small. It then constructs a fuzzy histogram of the surviving gradient directions. This creates a 16*8=128 dimension feature vector. This vector is then normalized by subtracting its mean and dividing by its standard deviation.
Design choices
I used a rotated patch to make the descriptor invariant to
rotations in the image. I use a 16x16
patch size as it would allow me to capture some local feature about the
interest point, but it would not be too big to include irrelevant information. Having a single histogram would cause the
information in the patches to be averaged out, so I defined 16 different 4x4
patches in order to retain the information of different patches
separately. As we learned from class,
edge directions tend not to change, and edge directions correspond well to
gradient directions. I threw out weak
edges by first applying a high pass threshold to the gradient magnitudes. The problem with traditional histograms is
that small changes in values around bin boundaries can lead to big changes in
the histogram produced. Since edge
directions are quite sensitive to noise, we would like the histogram to be less
prone to errors due to noise, so we use a fuzzy histogram by defining 8 directions
[0 – 2![]() ]. Each detected edge direction must lie
somewhere between two adjacent bins, and suppose its distance to bin 1 is
]. Each detected edge direction must lie
somewhere between two adjacent bins, and suppose its distance to bin 1 is ![]() and the distance to bin 2 is
and the distance to bin 2 is
![]() ,
then it contributes
,
then it contributes ![]() to bin 1 and
to bin 1 and ![]() to bin 2.
This way, small changes in detected edge directions produce commensurate
changes in the histogram. The last
normalization is to make the descriptor invariant to changes in ambient
lighting conditions.
to bin 2.
This way, small changes in detected edge directions produce commensurate
changes in the histogram. The last
normalization is to make the descriptor invariant to changes in ambient
lighting conditions.
Performance
ROC and AUC
|
|
|
|
ROC on
Graf images |
ROC on Yosemite
images |
|
Method |
Graf
AUC |
Yosemite
AUC |
|
Simple descriptor + SSD |
0.625210 |
0.897799 |
|
Simple descriptor + ratio test |
0.686555 |
0.803459 |
|
MOPS + SSD |
0.768227 |
0.867834 |
|
MOPS + ratio test |
0.792365 |
0.843684 |
|
Custom descriptor + SSD |
0.914804 |
0.891254 |
|
Custom descriptor + ratio test |
0.754935 |
0.920598 |
Harris operator images
|
|
|
|
Harris image for Graf image 1 |
Harris image for Yosemite image 1 |
Average AUC
|
Test
set |
5x5
window descriptor |
MOPS
descriptor |
Custom
descriptor |
|||
|
SSD |
Ratio
test |
SSD |
Ratio
test |
SSD |
Ratio
test |
|
|
Graf |
0.474497 |
0.533717 |
0.586486 |
0.559582 |
0.582125 |
0.564281 |
|
Leuven |
0.511819 |
0.489997 |
0.677964 |
0.688354 |
0.676296 |
0.653333 |
|
Bikes |
0.581818 |
0.564935 |
0.840260 |
0.583766 |
0.597403 |
0.500000 |
|
Wall |
0.520478 |
0.596005 |
0.622346 |
0.649891 |
0.708243 |
0.675346 |
Strengths and weaknesses
From Yosemite test case, the 5x5 simple descriptor seems to do very well as the images are (more or less) simply translated and not rotated. Hence, the 5x5 descriptor, which does not take rotation into account, does well as it assumes that the pictures are not rotated. MOPS descriptor did not do as well for this test case as the detected orientation of the interest point might be distorted by noise, thereby producing different 40x40 patches in both images, thus not matching well. The custom descriptor seems to do slightly better as the fuzzy histograms are somewhat less prone to errors in detected orientations.
However, when rotation (perspective warp) gets featured in the graf test cases, MOPS and the custom descriptor showed marked improvement over the 5x5 simple descriptor as they both take rotation into account.
Since the MOPS and custom descriptor are both normalized, they performed well for the leuven benchmark, proving to be less prone to lighting changes.
The Harris corner detector was not done in scale-space, and was thus sensitive to scaling. In the bikes benchmark, the images were increasingly blurred, and running the Harris detector at different scales would result in better interest point detection. All of the methods depended on the Harris detector, and hence did not perform well for this case, and the case with MOPS + SSD is likely to be an anomaly.
In the wall benchmark, we can see that the custom descriptor performed best as it uses edge directions instead of pixel values, and these edge directions changes less with perspective changes, and this explains the increased performance.
Overall, the 5x5 simple descriptor does well at detecting translations when no other distortions are present. The MOPS and custom descriptors handle changes due to rotation and ambient lighting well, but the custom descriptor does better to handle perspective warp. All descriptors did not do well for blurred images since they all depend on the Harris detector which should have been run at different scales to detect the canonical scale. With the detected scale, we can run the descriptors at the canonical scale to achieve scale invariance.
More images
Here are some more test images from my own collection.

Custom descriptor + SSD on translated image
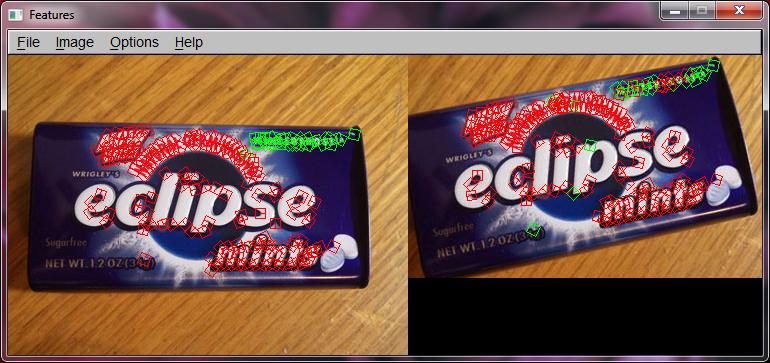
Custom descriptor + SSD on rotated image

Custom descriptor + SSD on scaled image
As we can see, the descriptor is invariant to translation and rotation, but sensitive to scaling. Feature detection and descriptors in scale-space would alleviate this problem.